学部時代はロボット中心の研究をやっていました。
下のリンクにある写真のロボットは私ともう1人の学生で制作したもので、
私はロボットの目(実際にはビデオカメラなんですが)の部分を担当していました(もう1人が腕の部分を担当した)。
このロボットは座高や腕の長さなどが人間のそれに近く作ってあり、
カメラのレンズの部分には組み合わせたミラーが取り付けてあり、
立体的に物体を見ることが出来ます。
ロボットの視野に見えている物体を人間がマウスで指示してやると、
その物体の位置を計算して腕を伸ばし、指が掴むはずなのですが、
こちらの意図に反して随分暴れ回ってくれました(^_^;)。
★ロボットの外観
[Progressive JPEG:16KB]
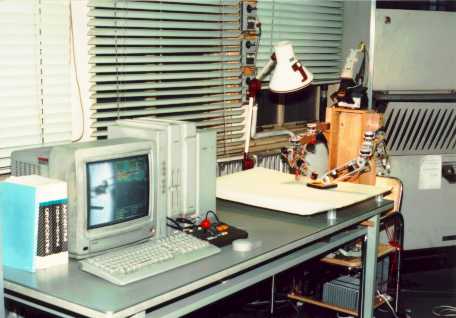
★システムの全景
[Progressive JPEG:22KB]
{kind=link}
{kind=link}